事業内容
- DX推進/IoT開発事業
- AI/ROBOTICS開発事業

7月末日の暑い中、大きな箱が運ばれロボットが会社に到着しました。配達員の方、暑い中ありがとうございます。

早速ダンボールを開けていきましょう。ロボット本体や付属品等を次々に開けていきます。


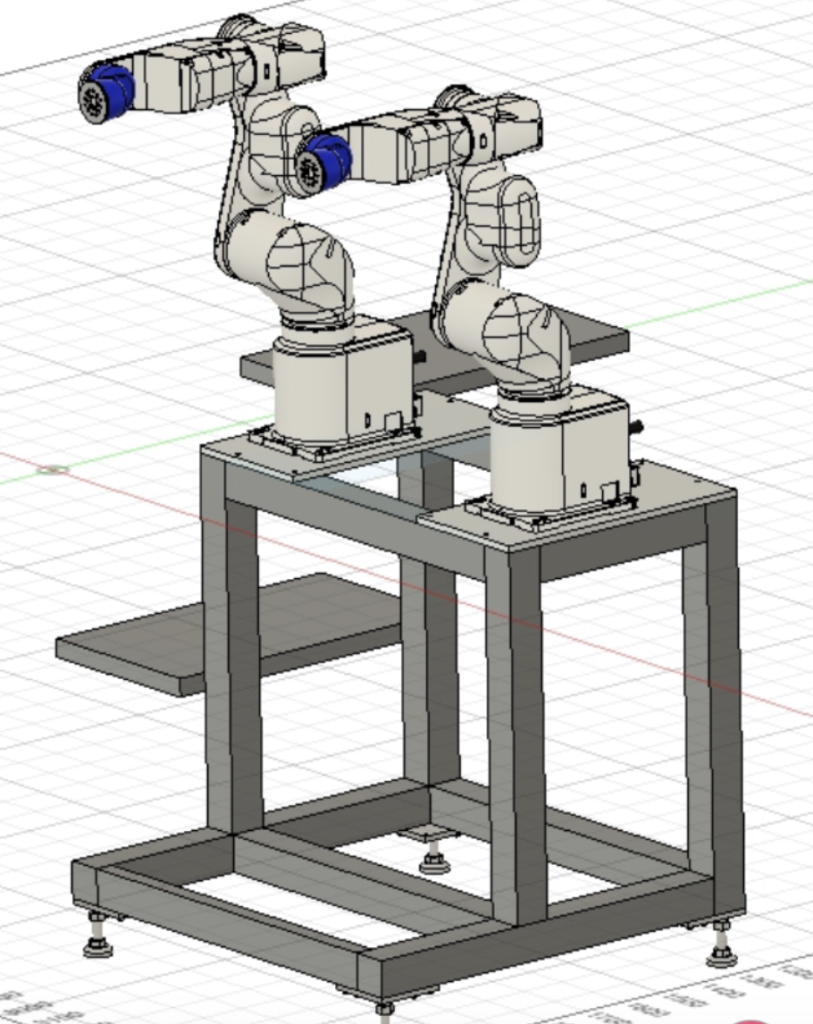
ロボットを動作させるために土台となる架台を設計します。
ロボットが到着する何週間も前から設計を行い、ロボットの稼働領域や別ユニットがどこに設置されるか、カメラ画角からどこにカメラが配置されるか等、様々な要素を確認しながら設計をしていきます。
設計した架台を組立てていきます。
ロボットが来る数日前にはアルミフレームなど主要部品類は届いており、組立てがスムーズに進んでいきます。

危険が無いよう2人がかりで慎重にロボットを持ち上げ、架台に設置していきます。ロボットが乗るベースプレートにネジでしっかりと固定し、更に次の1台を設置していきます。
設置を終えたら次は電源ケーブルや非常停止ボタンなどのケーブル類の接続を行い、電源を投入できるところまで準備をすすめます。
準備が整ったら電源を投入し、ロボットコントローラにPCを繋ぎブレーキを切りながら各種動作可能かを確認していきます。
装置として完成させるために、カメラやセンサー類を設置していき、実際に画像処理を基にロボットを動かしながら動作を作り上げていきます。
更にAI技術などをかけ合わせる事で、今までの産業界にない高度なロボット制御システムを作り上げていきます。