事業内容
- DX推進/IoT開発事業
- AI/ROBOTICS開発事業
こんにちは、株式会社ASTINAの広報担当です。この度ラズパイコンテストに応募させていただきました!

前半の記事ではこの装置を作った経緯をご紹介しました。この記事ではどんな仕様で作られているか、や完成までの経緯をご紹介していきます。
なぜこの装置を作ろうと思ったの?前編はこちら
犬の作品以外にも、2チームが記事作成をしています。宜しければご覧になってください。
・期間 2ヶ月(内 構想期間 7日間)
・チームの人数
メカ担当:1人 / エレキ担当:1人(サポート有)/ ソフト担当:2人(サポート有)
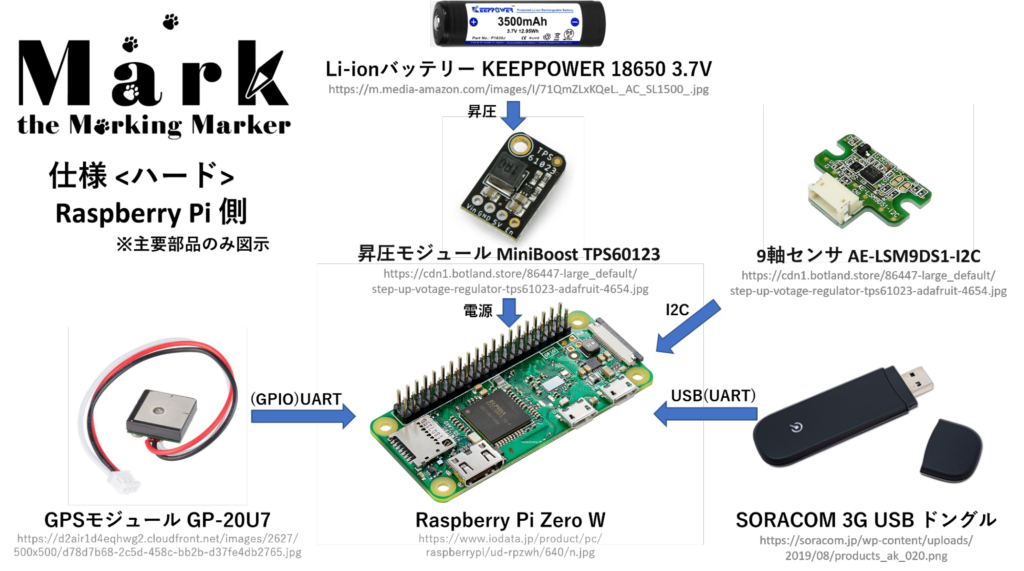
~準備物~
| 部位 | 製造メーカー | 仕様 | 製品URL |
| マイコンボード | Raspberry Pi | Raspberry Pi zero W | https://www.raspberrypi.com/products/raspberry-pi-zero-w/ |
| 3G通信モジュール | SORACOM | AK-020 | https://soracom.jp/store/5274/ |
| GPSモジュール | sparkfun | GP-20U7 | https://www.switch-science.com/catalog/2627/ |
| 9軸センサ | 秋月電子通商 | AE-LSM9DS1-I2C | https://akizukidenshi.com/catalog/g/gM-15381/ |
| バッテリ | KEEPPOWER | 3500mAh P1835J | |
| 昇圧モジュール | MiniBoost | TPS60123 | https://www.switch-science.com/catalog/6681/ |
このような構成で装置を作りました。
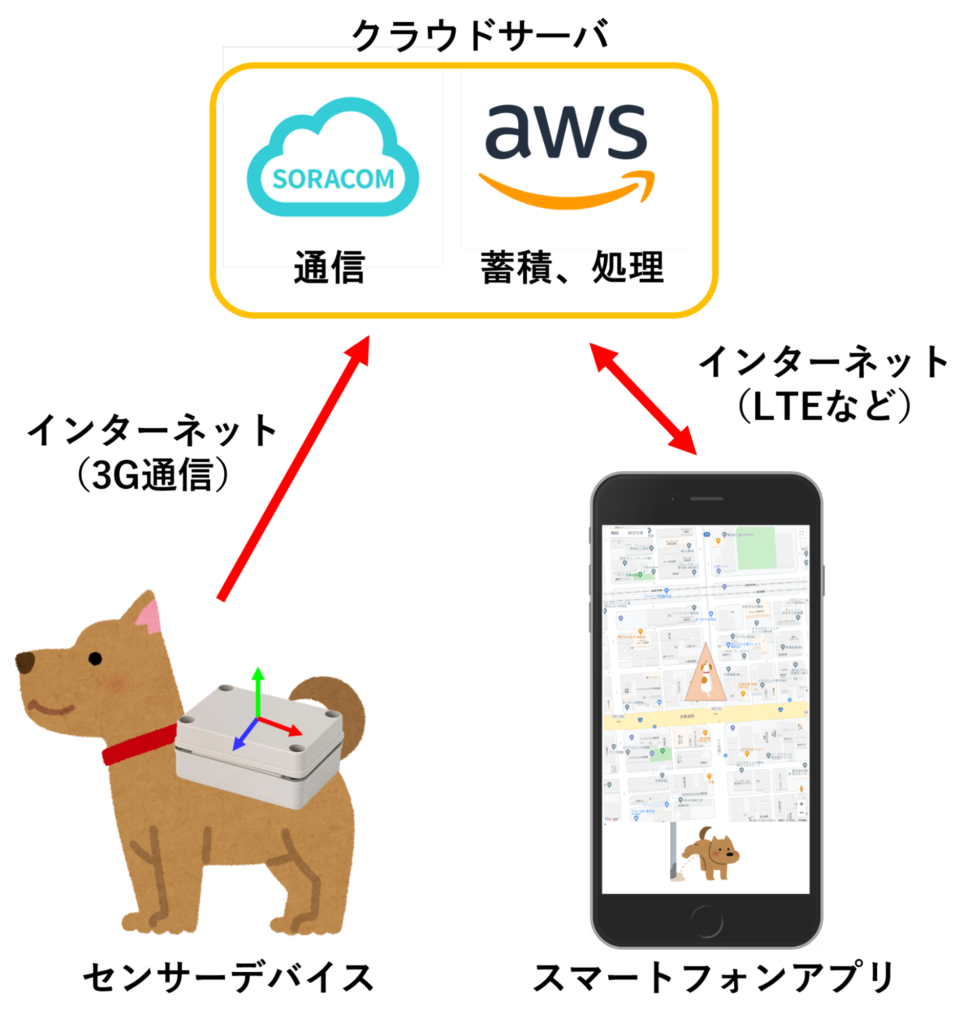
全体的な構成はこのようになりました。
デバイスが取得したデータをクラウドにあげ、そのデータを元にGoogleMapの画面で位置情報を表示しています。
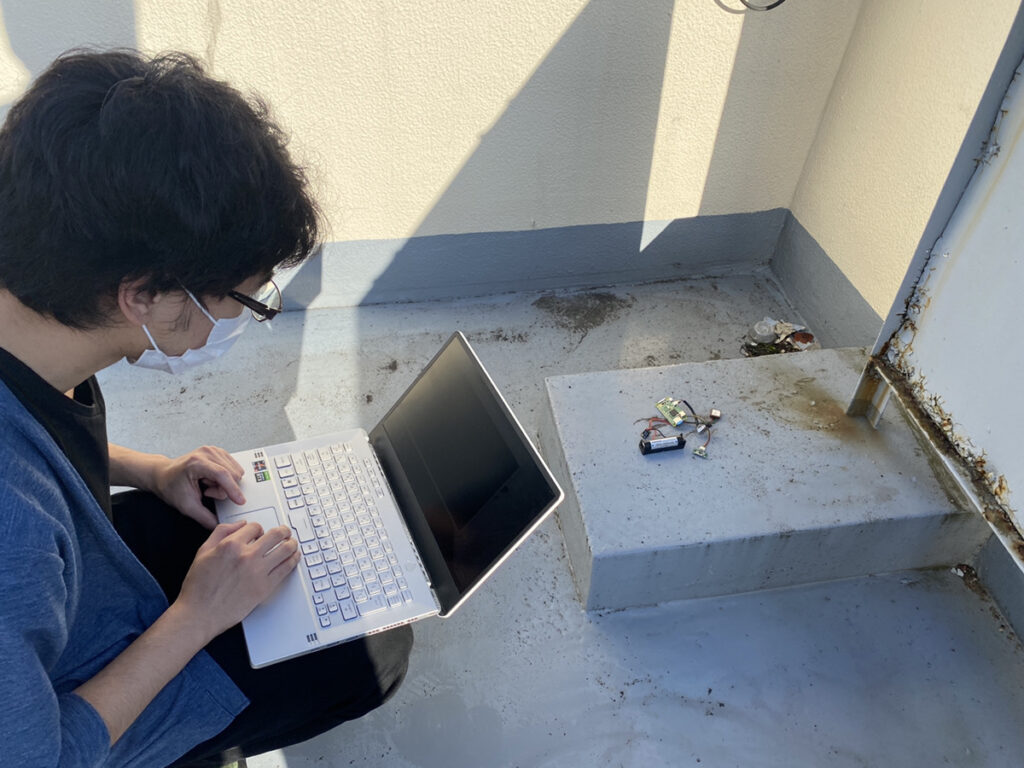
GPSの動作確認をしています。建物の中だと何分待っても変化がなかったのですが、屋上に行けばすぐに取得が始まりました。

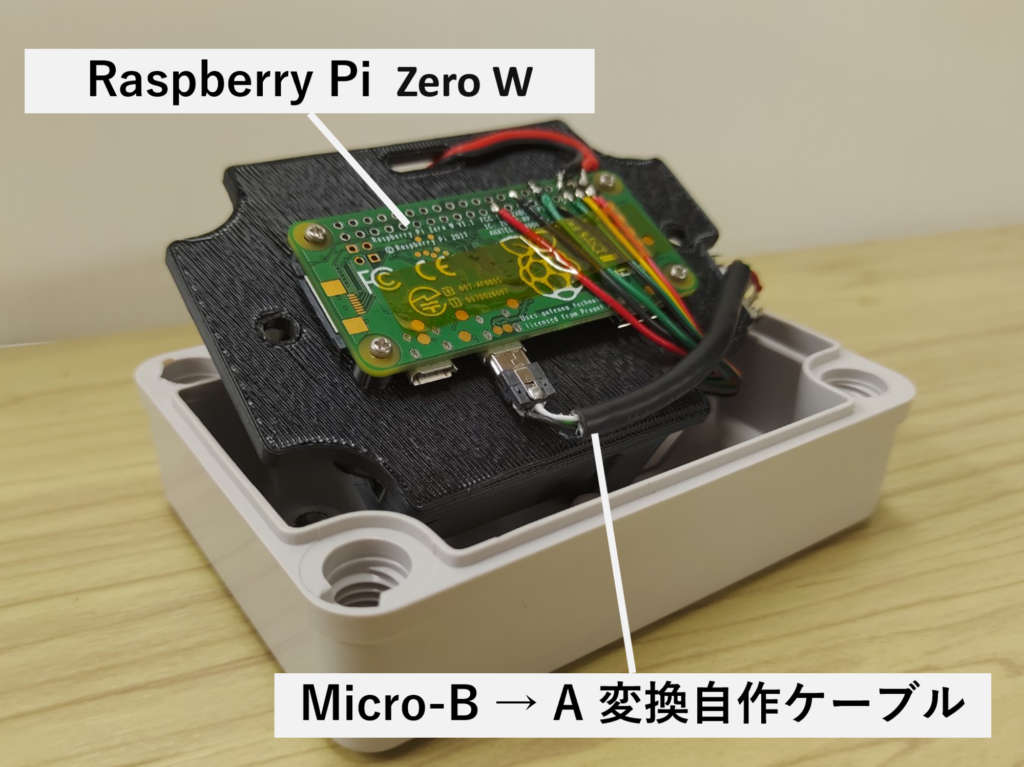
ラズパイやセンサ等を防水ケースに納めてみました。犬が背負うものなので小さいケースに納まるか不安でしたが。ラズパイに直接配線を半田付けをするなどして、ギリギリ納まりました。
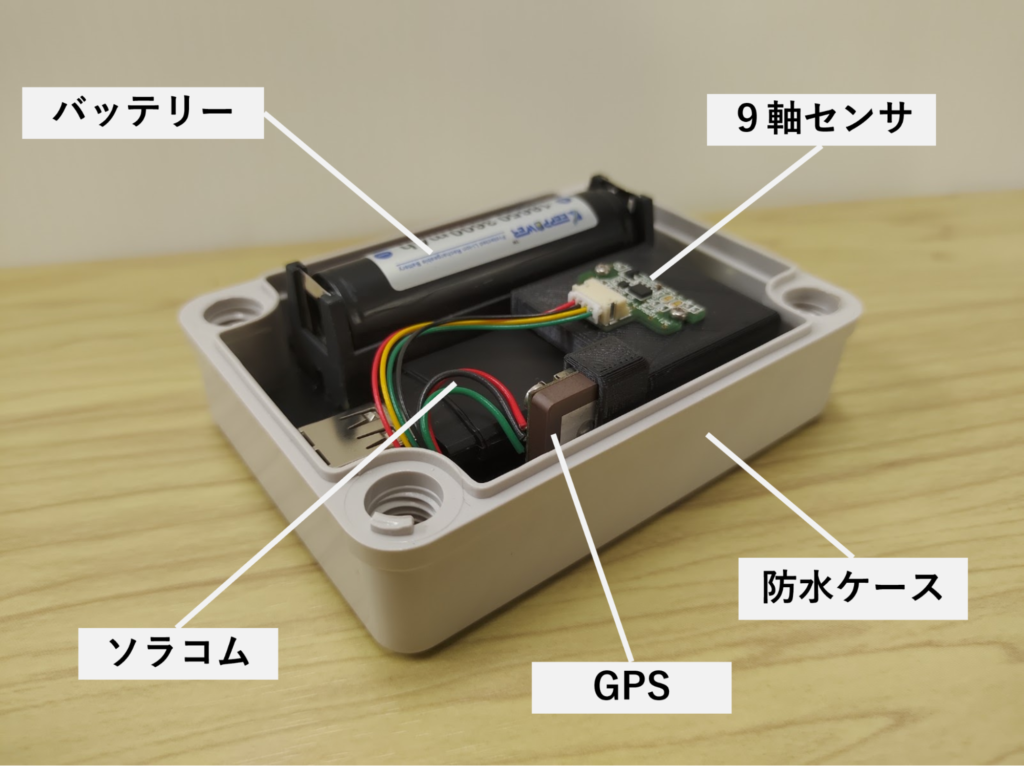
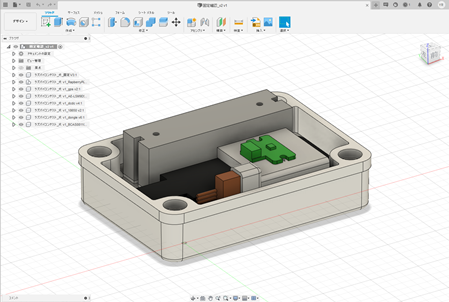
ケースの中の仕切りには3Dプリンタで印刷した部品を使用しています。
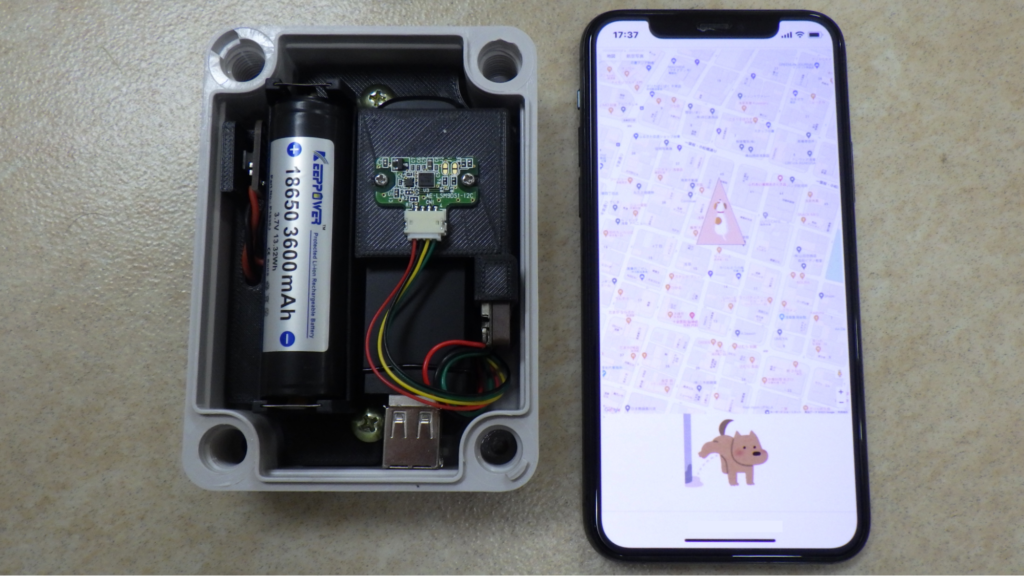
バッテリーを入れて動作確認をしてみました。表示されているGoogle mapは上部が北を指しています。装置を北に向けると画面真ん中の犬マークも上を向いているのでちゃんと方角を取得できているようです!
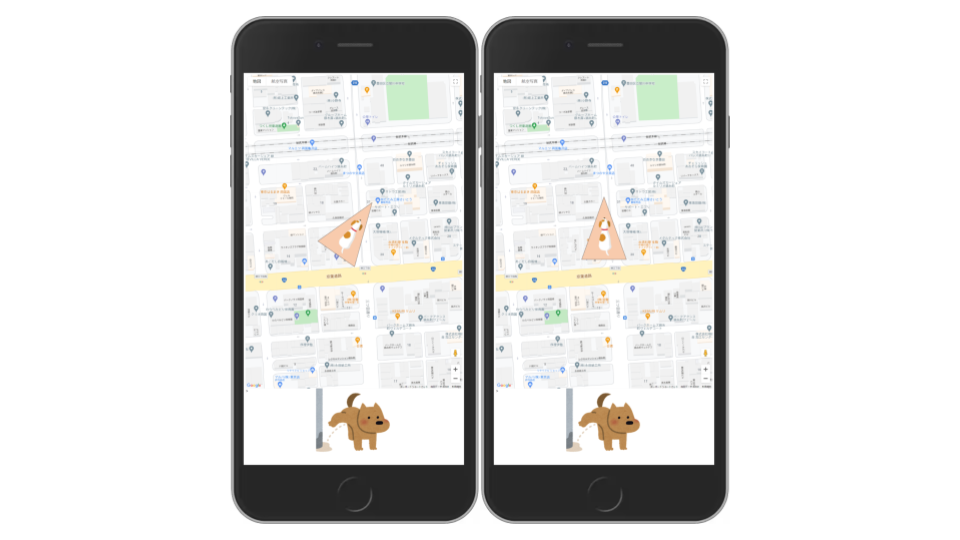
この様に、装置の方角は犬のマークの向きで確認できます。左側の画像だと北東、右側だと北に向いている状態です。
実際にお散歩中に使用してみました!マーキング時の写真ではないですが、ソラコムのおかげで屋外でも動作しました。
こちらの画像は夕方のお散歩中に撮影したようです。樹木の影が西から伸びているので太陽が西にあることがわかります。
スマホの画像では犬が北を向いているのがわかりますね!目的のデバイスが完成できました!!

この作品のソフト係を担当したのはなんとメカエンジニアのSさん。普段の業務の枠を超え、ソフトの知識も身に着けたいとのことで自ら立候補していました。周りのエンジニアからのサポートがありなんとか2か月間で形になりました。
今回のSさんのようにやる気と積極的な意欲があればチャレンジさせてもらえる環境であることを再認識しました。また、この作品を開発するために必要な費用は会社が負担してくれたため、個人では手を出しづらいような物・技術に触れられるいい機会だと思いました。
残念ながらこの作品の賞はいただけませんでしたが、なんと、、!今回応募した中の1作品が
賞をいただきました!!
作品を作ったみなさん、おめでとうございます!!そしておつかれさまでした!!
ASTINAのブログには、受賞した作品を含め他の作品の記事もアップしていますのでぜひご覧ください。
今回受賞した作品以外にも多彩な作品がラズパイコンテストのサイトで発表されています。興味のある方はぜひ応募してみましょう!